
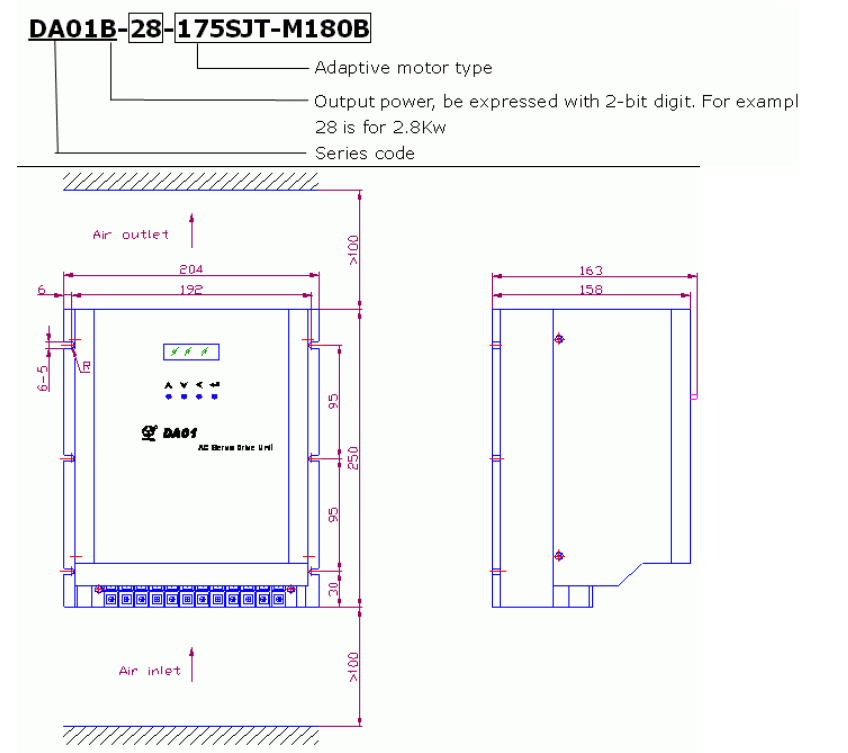
DA01B AC Servo Motor
DA01B AC Servo Motor DA01B uses the exclusive DSP(digital signal processor) and CPLD chip for the motor with hígh integration and excellent reliability; Mitsubishi intellective IPM module with perfect and reliable run function; Pulse command and analog command input, position feedback output and many I/O interfaces defined by customer to match with a open-loop […]
chi tiết sản phẩm

DA01B AC Servo Motor
DA01B uses the exclusive DSP(digital signal processor) and CPLD chip for the motor with hígh integration and excellent reliability;
Mitsubishi intellective IPM module with perfect and reliable run function;
Pulse command and analog command input, position feedback output and many I/O interfaces defined by customer to match with a open-loop or closed-loop controller to realize the position open-loop or speed closed-loop controller;
Convenient state monitoring, and parameter modification.
| Type | DA01B-28/35 | DA01B-38/45/60 | ||
| Rated output current(A) | 21 | 31 | ||
| Rated motor power( Kvv ) | 2.6~3.5 | 3.5~6.0 | ||
| Input povver supply | Three-phase AC220V(-15°C~+10°C 50/60Hz) | |||
| Environment | temperature | operation : 0~5°C storage : -20°C~80°C | ||
| humidity | Less than 90% (no dewing) | |||
| vibration | Less than 0.5G(4.9m/s2) ,10~60Hz(non-continuous ) | |||
| Working mode | 1/position control 2/extemal speed control 3/internal speed control 4/speed trial run 5/speed jog 6/encoder zeroing | |||
| Control characteristics | Speed frequency response: ≥200Hz | |||
| Speed fluctuation rate : < ±0.03 ( 0~100% load change) | ||||
| Timing ratio: 1:5000 | ||||
| Pulse frequency: ≤500kHz | ||||
| Control input | Servo enabling, alarm clear, forward OFF, inverse OFF, zero speed clamp, offset counter zeroing/speed selection 1, command pulse OFF/speed selection 2, CCW tDrque limit, CW torque limit | |||
| Control output | Servo ready, servo alarm, positioning completion/speed arrival, hold release, motorzerospeed, encode zero, user outputand 8output interfaces. | |||
| Position control | Input mode | 1/pulse + direction 2/CCW pulse/ CW pulse 3/A/B orthogonal pulse | ||
| Gear ratio | Gear ratio numerator: 1~32767 gear ratio denominator: 1~32767 | |||
| Encode feedback | 2500p/r (resolution : 10000) incremental encoder | |||
| Speed command | -10V~+ 10V or 0~10V external speed command, 4 internal set speed | |||
| Monitor function | Speed, current position, command pulse quantity, position offset, motor torque, motor curnent, rotor absolute position, command pulse frequency, run state, input/output state and so on | |||
| Protection function | Overspeed, overvoltage, undervoltage, overcurrent, overload, encoder abnormality, control power supply abnormality, and position out-of-tolerance | |||
| Display, operation | 6-bit LED, 4 pressing keys | |||
| Applicable load inertia | Less than 5 times of motor inertia | |||
| Specification Item |
175SJT-M | 175SJT-M | 175SJT-M | 175SJT-M | 175SJT-M |
| 180B | 180D | 220B | 220D | 300B | |
| Rated power (kw) | 2.8 | 3.8 | 3.5 | 4.5 | 3.8 |
| Polar logarithm | 3 | ||||
| Drive unit input voltage (V) | Three-phase AC220V | ||||
| Rated currrent (A) | 15 | 16.5 | 17.5 | 19 | 19 |
| Zero speed torque (N.m) | 18 | 18 | 22 | 22 | 30 |
| Rated torque (N.m) | 18 | 14.5 | 22 | 17.6 | 24 |
| Max. torque (N.m) | 36 | 29 | 44 | 35.2 | 48 |
| Ratedspeed (r/min) | 1500 | 2500 | 1500 | 2500 | 1500 |
| Max. speed (r/min) | 2000 | 3000 | 2000 | 3000 | 2000 |
| Rotation inertia (kg.m2) | 6.5×10-3 | 6.5×10-3 | 9.0×10-3 | 9.0×10-3 | 11.2×10-3 |



