DAP03 AC Servo Spindle
DAP03 AC Servo Spindle DAP03 with wide timing range, small speed fluctuation and short starting/braking time, DAP03 AC Asynchronous Spindle Drive Unit realizes digital vector control of AC asynchronous motor to gain exact positioning of AC asynchronous motor. It is the optimum choice to improve performance and reduce the cost of CNC machine. High performance […]
chi tiết sản phẩm

DAP03 AC Servo Spindle
DAP03 with wide timing range, small speed fluctuation and short starting/braking time, DAP03 AC Asynchronous Spindle Drive Unit realizes digital vector control of AC asynchronous motor to gain exact positioning of AC asynchronous motor. It is the optimum choice to improve performance and reduce the cost of CNC machine.
High performance DSP and CPLC to realize digital control and high reliability;
High pressure AC busbar(600V), bịg power IPM, excellent dynamic response;
Asynchronous motor vector control, wide valid timing range and small speed fluctuation;
External contact signal can the spindle orientation and set 8 positioning points;
Three-phase 380V direct input without power transformer to get the convenient installation and low cost.
| Drive unit type | DAP03-037 | DAP03-055 | DAP03-075 | DAP03-110 |
| Continuous output power (S1) | 3.7kW | 5.5 kW | 7.5kW | 11kW |
| 30min output pov/er (S2) | 5.5kW | 7.5 kW | 11kW | 15kW |
| Input power supply | 3 three-phase AC380V (-5% + 10%) 50/60Hz | |||
| Working mode | Internal speed run, external speed run, Jog, trial run, position run, speed/position svvitch run | |||
| Constant torque timing ratio | 1000:1(corresponding motor speed 1.5~1500 r/min) | |||
| Constant povver timing ratio | 4:1(corresponding motor speed 1500~6000r/min) | |||
| Stead speed precision | Foundation speed (ratedspeed) ×0.1% | |||
| Speed control mode | Speed closed loop control with speed teedback | |||
| External speed command input | 10+10V or 0~+10V | |||
| Speed feedback input | Incremental rotation encoder signal teedback, lines 128~8000p/r, A/B/Z differential signal | |||
| Position run mode | Input mode | 1/pulse+direction 2/CCW pulse/CW pulse 3/A/B two phases orthogonal pulse | ||
| Electronic gear ratio | gear ratio numerator 1~32767 gear ratio denominator 1~32767 |
|||
| Orientation function | Set 8 orientation points on the motor encoder or the spindle encoder, the external contact selects the orientation point: start motor(spindle) orientation, orientation angle deviation< | |||
| Spindle position feedback input | Incremental rotary encoder signal fee. lines 128~8000p/r, A/B/Z differential signal | |||
| Position feedback output | Motor encoder or spindle encoder signal 1:1 output, A/B/Z differential signal | |||
| Control input signal | 7 input intertaces: servo enabling, zero speed clamp, CCW, CW, speed(orientation point), orientation start, speed/position svvitch and so on | |||
| Control output signal | 7 output intertaces: alarm, ready, speed arrival, orientation completion, zero speed output, speed/position switch, motor z pulse | |||
| Protection function | Protection from overvoltage, undervoltage, overspeed, overcurrent, overload, overheat, abnormal encoder and so on | |||
| Display function | 6-bit LED, displaying sottvvare/hardvvare version, working mode, current speed, speed command, encoder position/state, current, torque, I/O State, busbar voltage, alarm code, parameter and so on | |||
| Operation function | 5 pressing keys to select vvorking mode and display content to modity parameters and so on . | |||
| External brake resistance | Refer to Brake Resistance Allocation Table | |||
| Storage temperature and humidity | Belovv -40~55°C / 95%RH (40°C) | |||
| Working temperature/humidity | 0~40°C/ 30%~95% (no dewing) | |||
| Vibration | ≤0.6G(5.9m/s2) | |||
| Protection grade | IP20 | |||
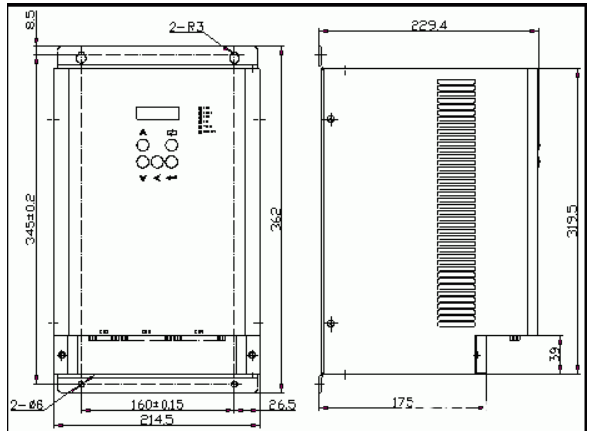
| Appearance dimension | 214.5×362×229mm | |||
e 1: The servo motor with the special polar and the basic frequency is specially ordered, and the optional servo unit must use the exclusive software; max. speed of the standard allocation servo motor is 6000r/min, and the motor with more 6000r/min speed is ordered specially;
e 2: When the ratio between the servo motor and the spindle is 1:1 without gap drive, the spindle can cormplete the exact orientation without the spindle encoder; when the ratio is not 1:1, the spindle cannot does without the spindle encoder.